Organizations
BatttleBots is one of six robotics teams within RoboJackets, the primary student robotics organization at Georgia Tech. Our team competes in combat robotics - similar to the BattleBots TV show but at a smaller scale. I’ve all four years during my time at GT, and have become more and more involved over time.
As the team lead of a 45 pound combat robot, I oversaw the design, manufacturing, assembly, testing, and competition during the National Robot Havoc League 2024 and 2025 seasons. We saw great success at the qualifier event, winning first place and becoming the first collegiate team, and first robot of our design to win an event. During world finals in 2024, we placed second, as well as becoming the #1 ranked robot out of over 200 in the league.
Additionally, I mentored a group of 16 new members to build a 3lb combat robot. I taught CAD principles, machining, and robotics basics, and fostered a collaborative team environment.
For more details, click here or scroll down
The Georgia Tech Space Systems Design Laboratory is an interdiscineplary research lab within the School of Aerospace engineering that focuses on creating new advanced space technologies for robotic and manned space exploration.
As a member of the Avionics team of the VISORS satellite project (VIrtual Super Optics Reconfigurable Swarm), I was able to work on a novel set of spacecraft whose goal was to fly in formation in low earth orbit to act as a single high focal length space telescope. My responsibilities included making and testing critical design revisions for avionics hardware, developing integration and testing procedures, and supporting the interfacing of a large number of different electronics systems aboard the satellite bus.
For more details,click here or scroll down


Georgia Tech Experimental Rocketry is a student organization that pushes the boundaries of amateur rocketry using a rigorous aerospace engineering based approach.
As a former member of the GTXR electrical team I worked on a wide variety of projects - from architecting and building a safety critical rocket motor data acquisition and remote ignition system to designing a spaceshot capable flight computer.
During my time in this organization I learned a lot about the practical use of electronics systems within a larger project and was able to complete several projects I was proud of.
For more details, click here or scroll down
Internships

Warehouse Sorting Machine Safety System
Summer 2024 - Amazon
At Amazon, I supported the process of taking an early state prototype package sorting machine from alpha to production readiness. I covered various areas including regulatory standards compliance, functional safety, and verification/validation.
Some highlights include:
Performed electrical and control system risk assessments based on ISO machinery standards
Worked onsite at the testing lab to verify all safety critical system functionality matched requirements and expected behavior
Created two Technical Construction Files - large data packages which include all the information required to show a machine is safe and compliant to regulatory standards
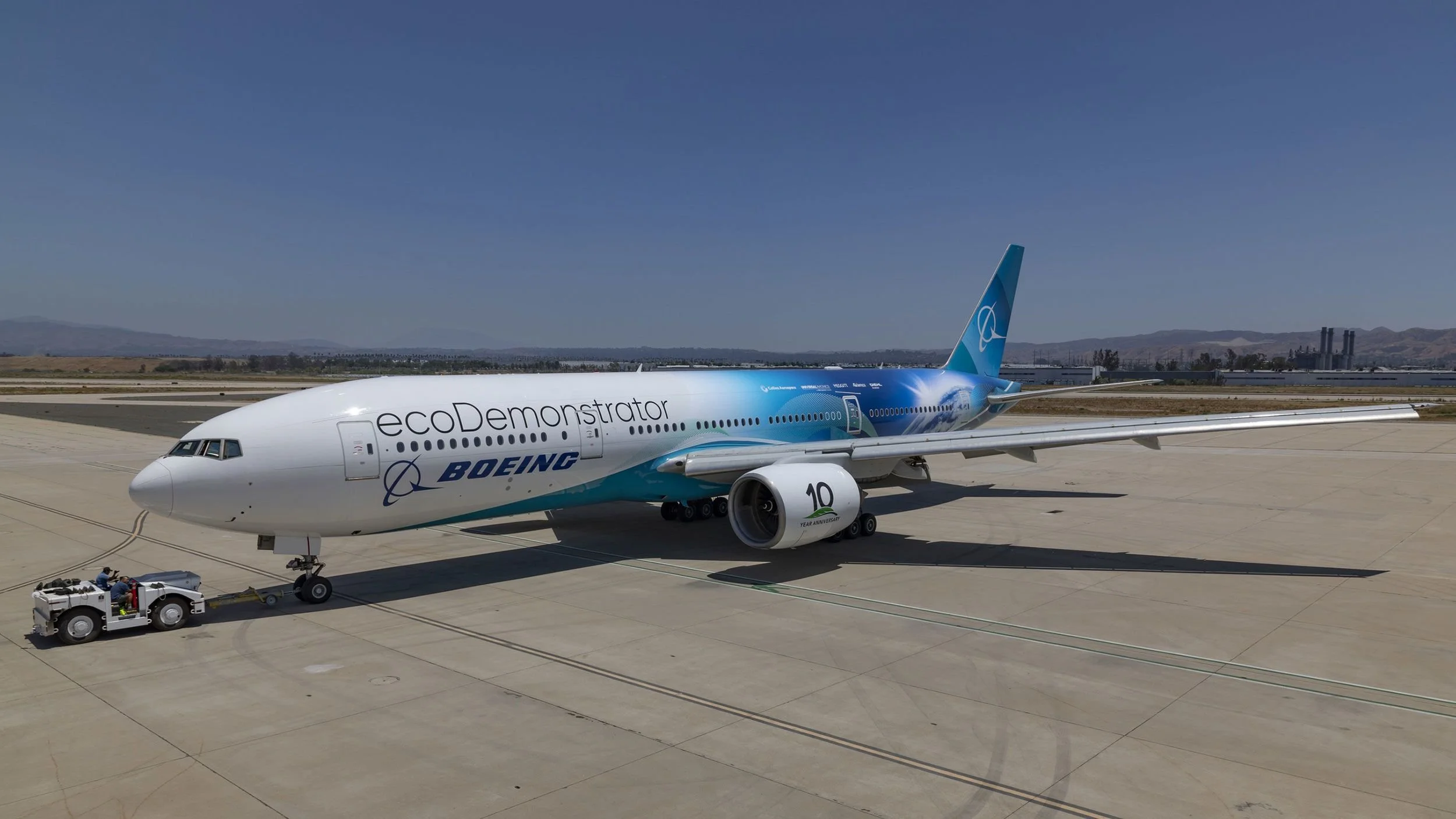
777-X Flight Demonstrator Airdata System
Summer 2023 - Boeing
At Boeing, I worked on the product development team to support installation of a novel sensor system on a flight demonstrator aircraft. My time was split between sensor system layout and design, and practical lab testing to confirm expected behavior of aircraft communication systems.
Some highlights include:
Modified communications schema for addition of new sensors, routing of data from sensors to flight computer
Wrote C++ code for I/O computers to handle the relabeling, combination, and transmission of ARINC 429 (avionics serial protocol) messages
Organized lab testing of avionics hardware to ensure proper communication over ARINC 429 protocol
Created proposal for COTS avionics hardware purchase configuration based on system requirements
OLED display material quality testing automation
Summer 2022 - Universal Display Corporation
Working at the Universal Display Corporation, I initially took on a test-technician role, running daily operations for the quality team’s initial testing and long-term characterization of material used in the manufacturing of OLED screens.
During my time as a technician, I found that the process for monitoring lifetime testing of display material to be very time consuming and error prone, due to the fact that hundreds of tests were running continuously and needed to be checked daily for minor data deviations in case they needed to be rerun due to defects in the test sample deposition process.
After getting approval from my manager, I started work on a system that automatically fetched all test data and used statistical analysis to determine what tests needed attention/review. I was successfully able to generate a list of likelihoods of test failure for each sample, and demonstrated its effectiveness by saving 1+ hours per day of work while simultaneously catching failed tests faster.
Projects
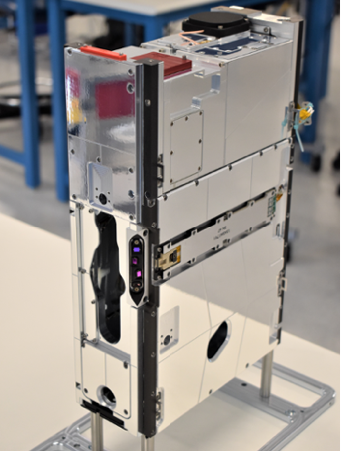
Payload Avionics Interface Board (PAIB)
Fall 2023 - Space Systems Design Lab, VISORS project
While working on the VISORS project, I became involved in the development of the PAIB, which serves as the connection between the commercial BCT XB1 satellite bus and the onboard scientific payload as well as communications systems, sensors, and the propulsion system. This board was responsible for providing power monitoring and fault protection for all non-satellite bus onboard systems, facilitating communication between the satellite bus and payload, and storing collected scientific data before transmission to a ground station.
I joined this specific project after the first revision of the board was completed, and found to have numerous problems with power monitoring circuitry. I worked on the board redesign, assembly, and test procedure creation/execution, which had to be extremely stringent due to the aerospace application.
During this project I gained lots of experience debugging circuits and methodically testing every function of a board, and also learned more about the documentation process by creating an interface control document for sharing to other subteams working on the satellite.
Unfortunately I’m not able to provide any more detailed information or board/schematic pictures due to ITAR restrictions.
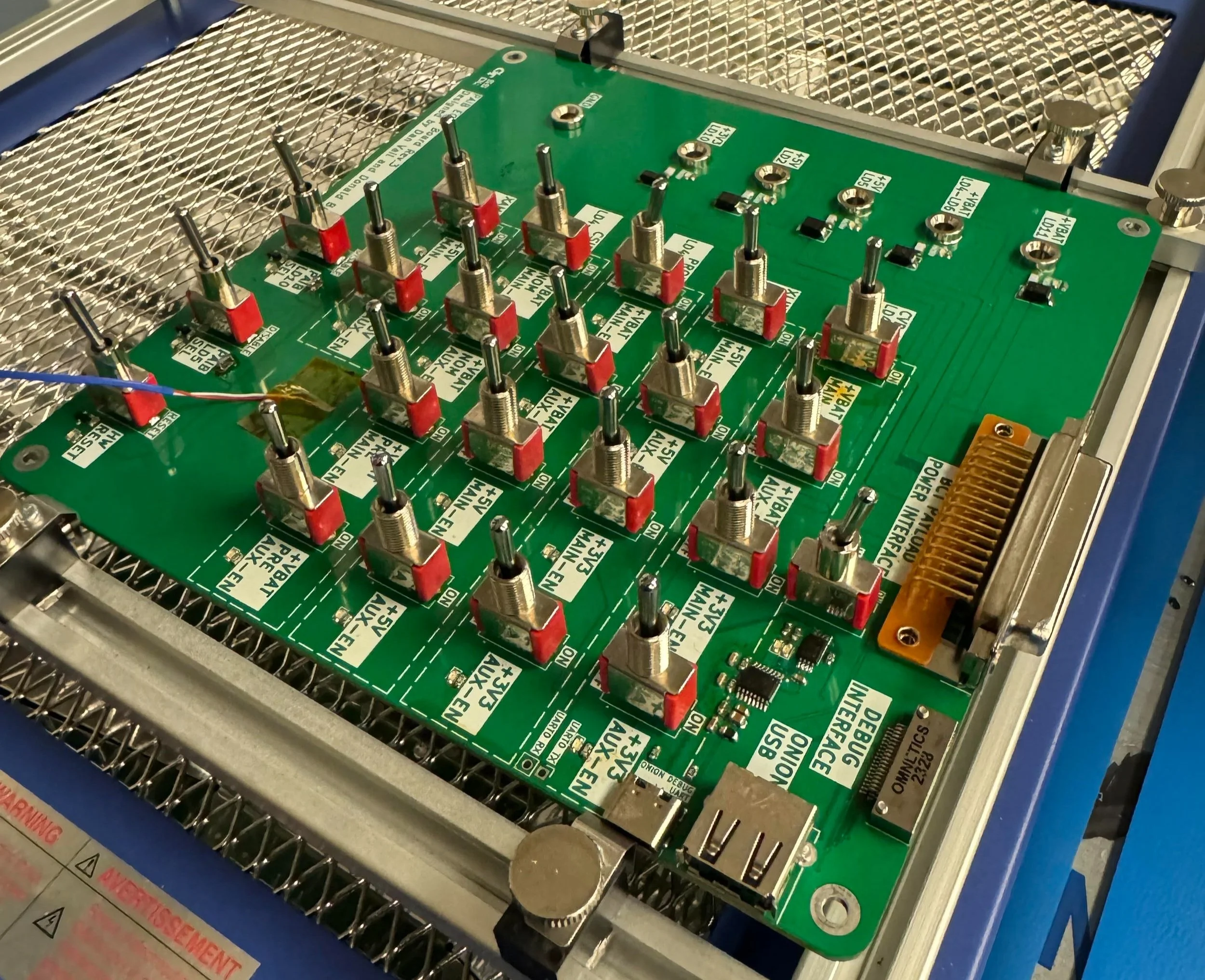
Electrical Ground Support Equipment (EGSE) Board
Fall 2023 - Space Systems Design Lab, VISORS project
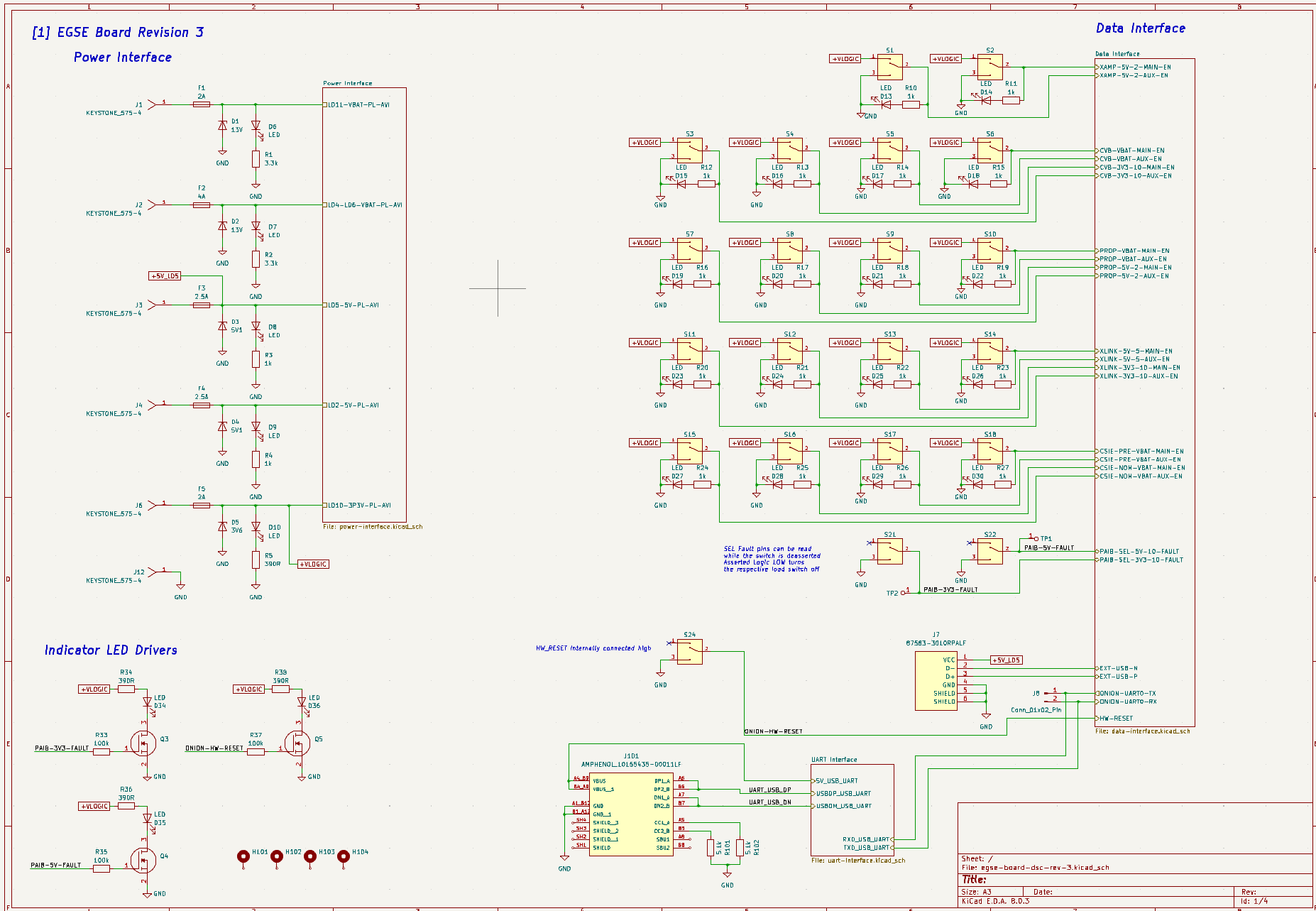
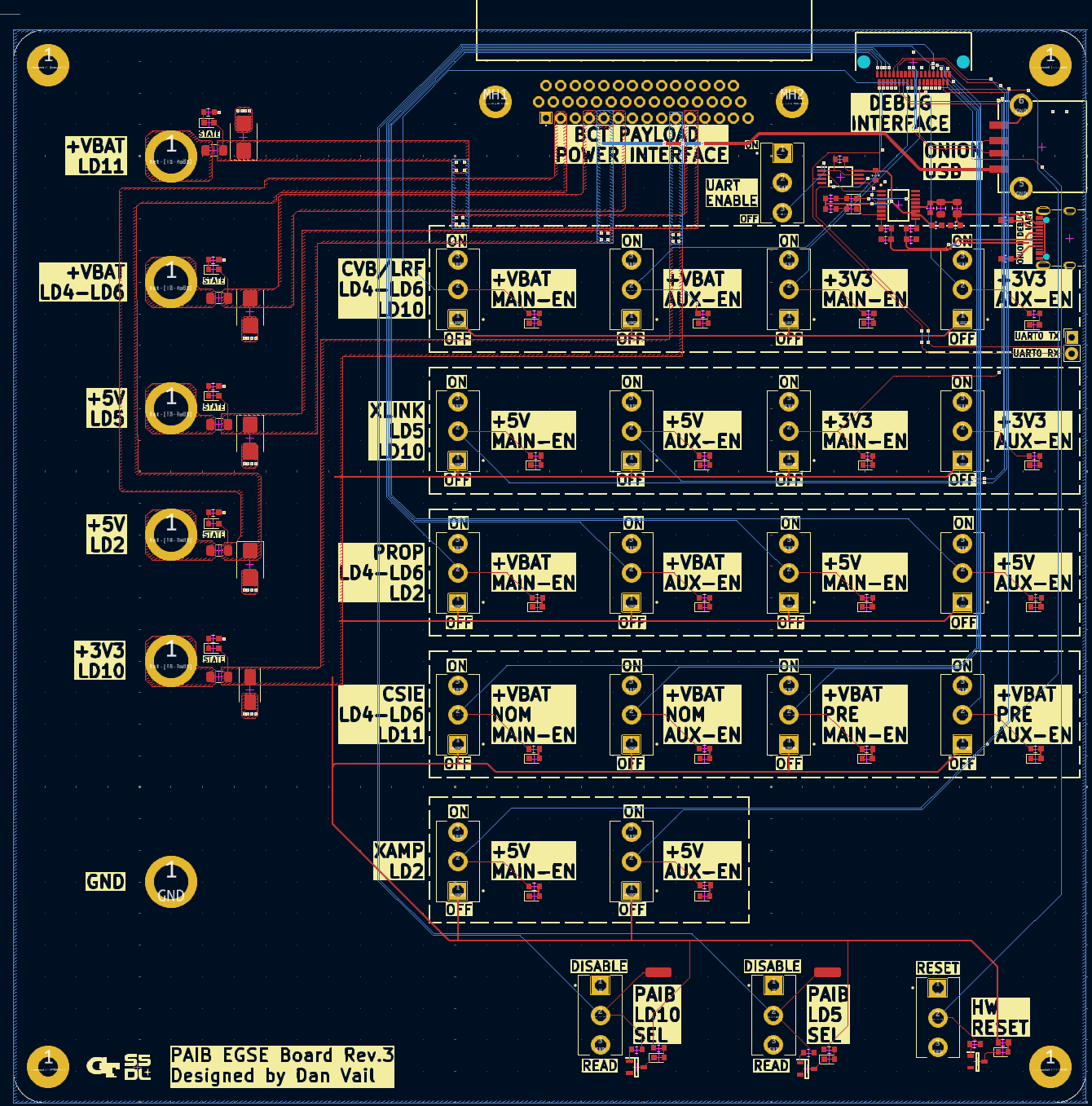
Another project I worked on for the VISORS mission was the creation of an electrical ground support board for the spacecraft avionics. The main requirements for this board were manual control and monitoring of all power rail load switches, display of any fault signals, and usb-serial communication to the onboard embedded Linux computer.
Some of the main design features include:
Onboard USB-UART converter facilitating communication with the satellite
Digital bus switch to avoid interfering with spacecraft UART line when not in use
Mosfet driven LEDs for all power rail fault status signals
Power input and fusing for all spacecraft voltage rails
Once I had completed the board design and construction, I was able to successfully demonstrate its use in debugging the malfunctioning payload avionics interface board. The EGSE board will see further use in final testing once spacecraft integration has been completed.


45 Pound Combat Robot
Sumer 2022 - Present, RoboJackets
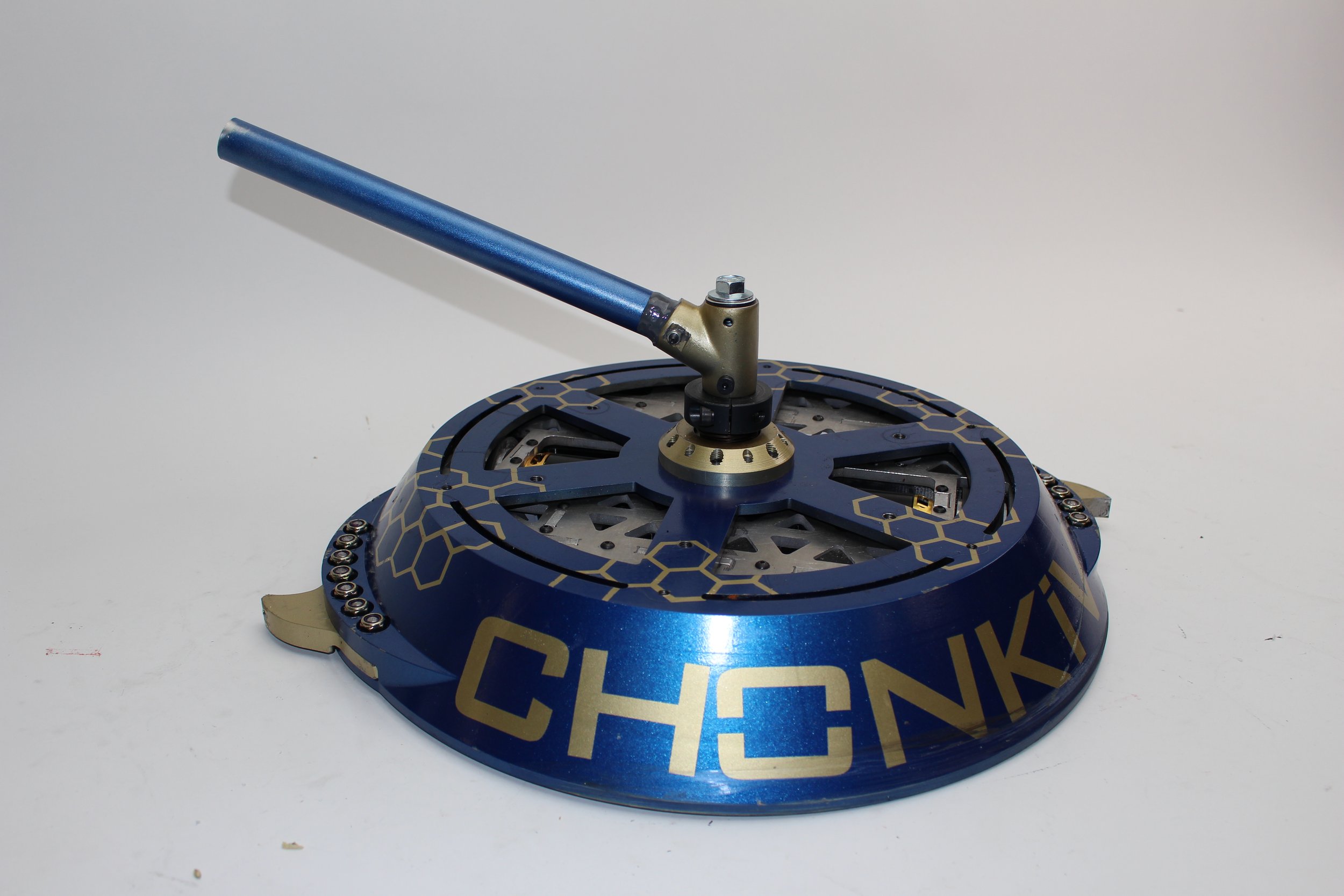
I joined my battlebots team in Summer 2022 on “Chonkiii”, a third iteration robot based on the shell spinner concept - a robot that combines its armor and weapon into a large, fast rotating shell surrounding the outside of the robot. This design is very powerful due to the 360 degree protection and weapon coverage, but is a difficult design to execute and other shell spinners have seen limited success.
Chonkiii saw some success in competition but ultimately was held back by structural and reliability issues, and that’s when I became team lead in Summer 2023 for the next iteration: Chonkiv. I led a ~10 person team through all phases of the process from ideation to competition and strategically kept what worked well from older versions while implementing new ideas where our weak points were. Effectively, this led to nearly every part being every part being redesigned in some way for improvements such as better modularity, improved electronics routing and organization, better serviceability, and more structural integrity.
It was a huge team effort getting the robot built with nearly everything being machined in house as well as important steps such as heat treating, motor controller tuning, and battery capacity testing needing to be completed at critical times. In the end it was worth it when we became the first collegiate team to win an event, and demonstrate for the first time that shell spinners can be very competitive.
For more technical info, the complete design documentation can be found here.
If you’re interested, here’s one of our fight videos
TactileVision - Accessibility device for the vision impaired
October 2023
In 2023, I participated in a hackathon at Georgia Tech called HackGT. It’s a 36 hour annual event that students from around the world attend where the main attraction is a competition to create an innovative project in a single weekend.
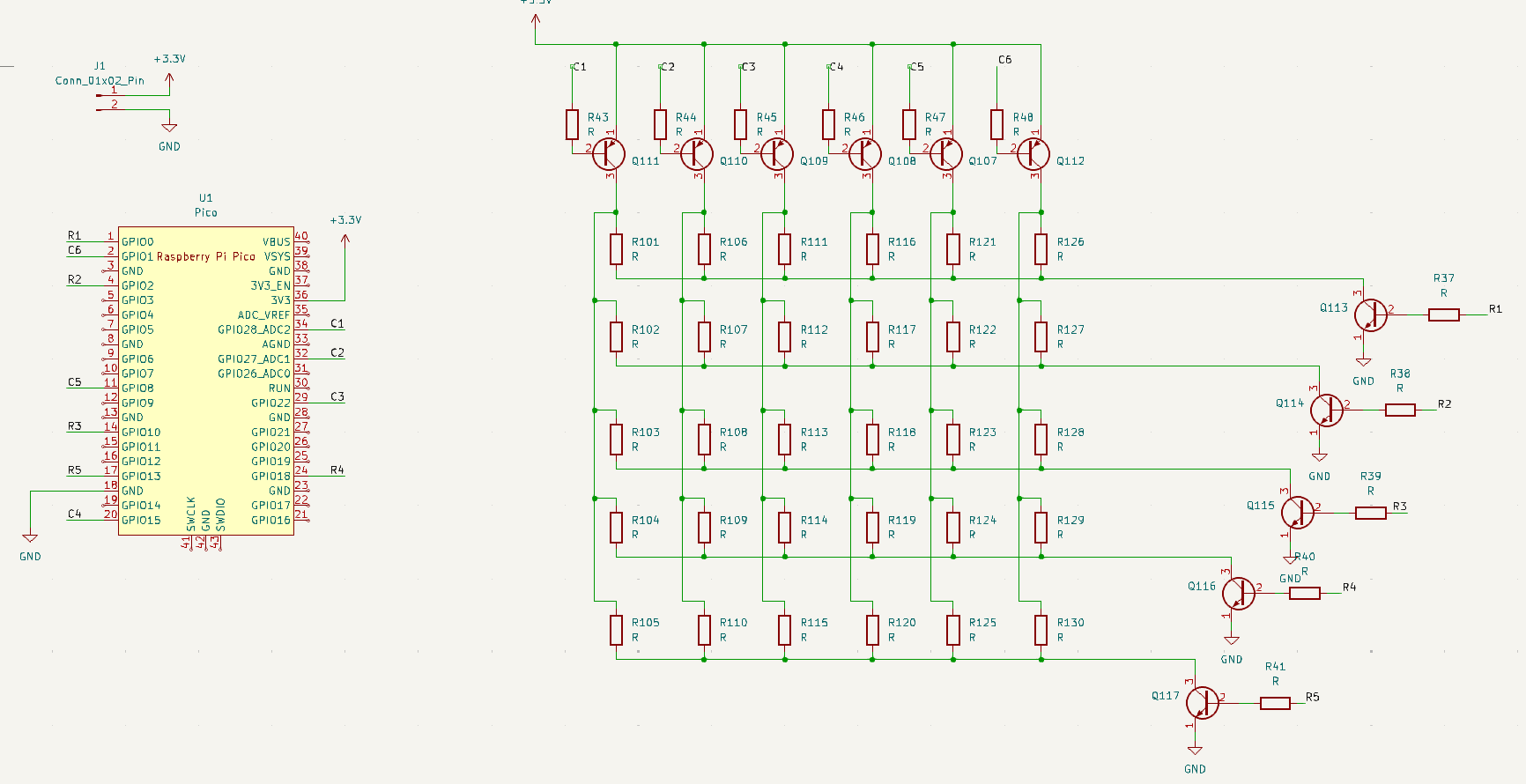
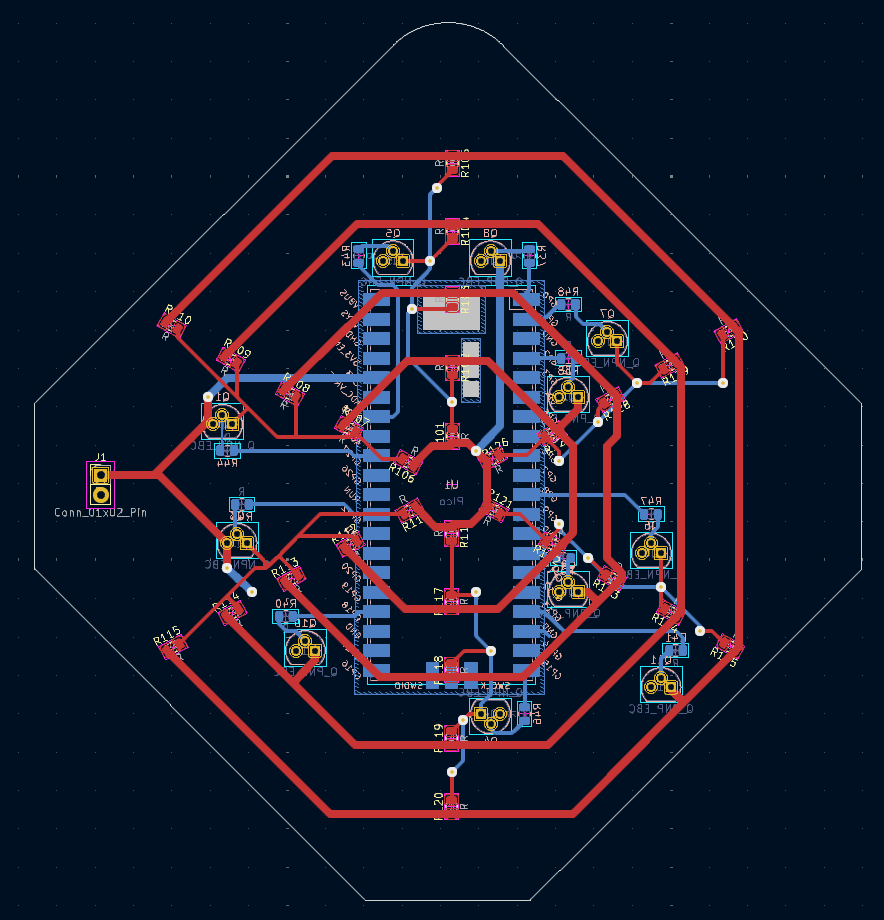
I worked with two other team members to create TactileVision, a system that consists of a headset with sensor array to measure the distance of a person’s surroundings, and handset which wirelessly receives the data and translates it into a heatmap readable by touch. I handled the electronics hardware which included schematic design, PCB layout, microcontroller module selection, PCB manufacturing and assembly, and debugging/testing. General hardware specs include:
Multiplexed resistor array on the handset, allowing individual heating of each SMD resistor at a high resolution with limited input pin count
2 Raspberry Pi Pico W modules, one in the handset and one in the headset used for reading sensor data, Bluetooth LE communication, and translating sensor data into a multiplexed control signal output for the handset resistor grid
6 ultrasonic sensor array on the headset for sensing of surroundings
All design and construction was completed with parts on hand in a total of 36 hours at the GT makerspace, so the design was not optimal, but did work and provided a proof of concept. After going to judging, we received the Best Accessibility Hack award out of 52 submissions.
Since then, we have met with a school for the blind to better understand customer needs, and are working on a more polished version with features including a more sleek design, better sensor hardware, phone configuration app, battery management hardware, and more.
Two Stage Amateur Rocket Flight Computer
Fall 2022
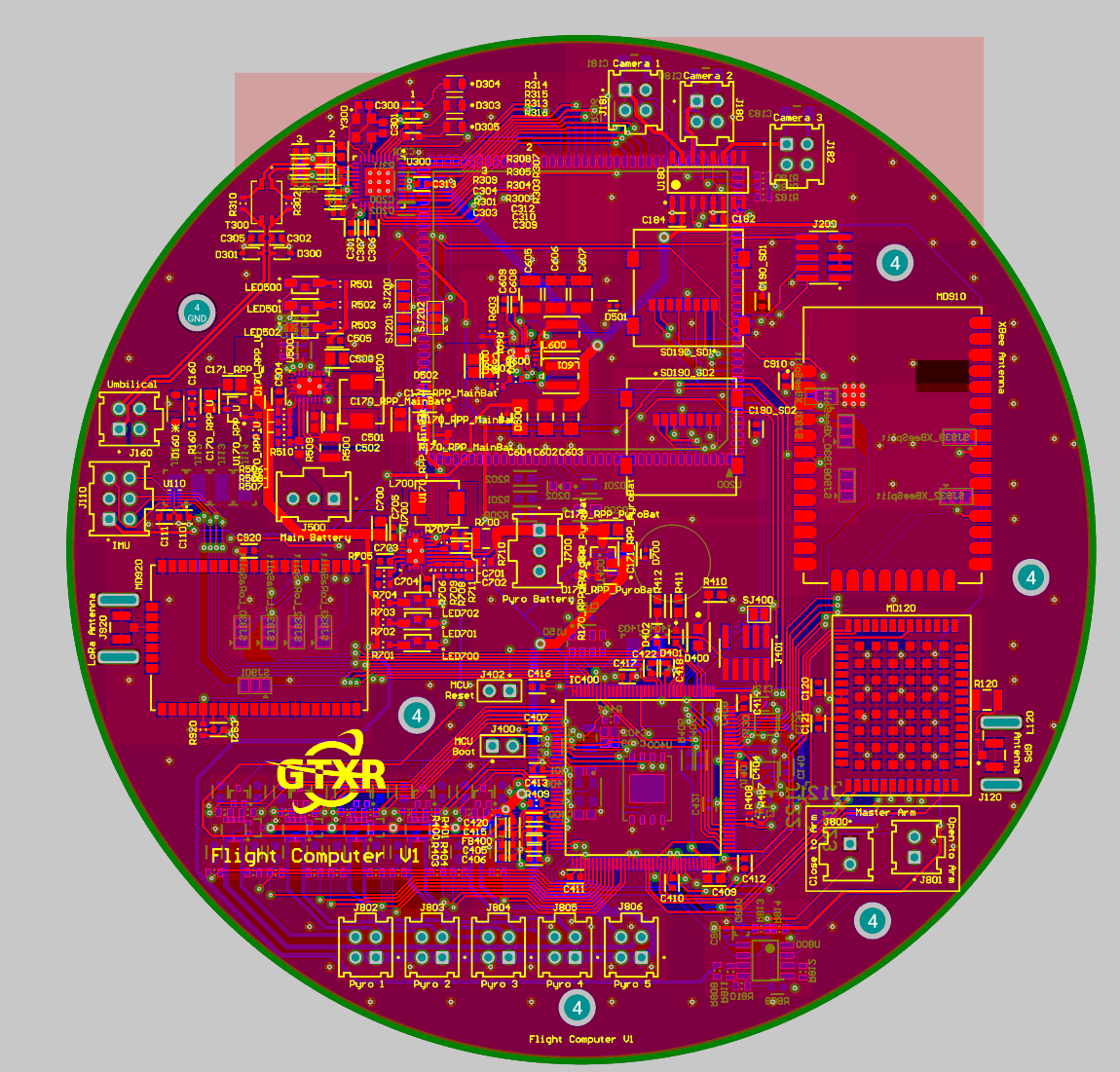
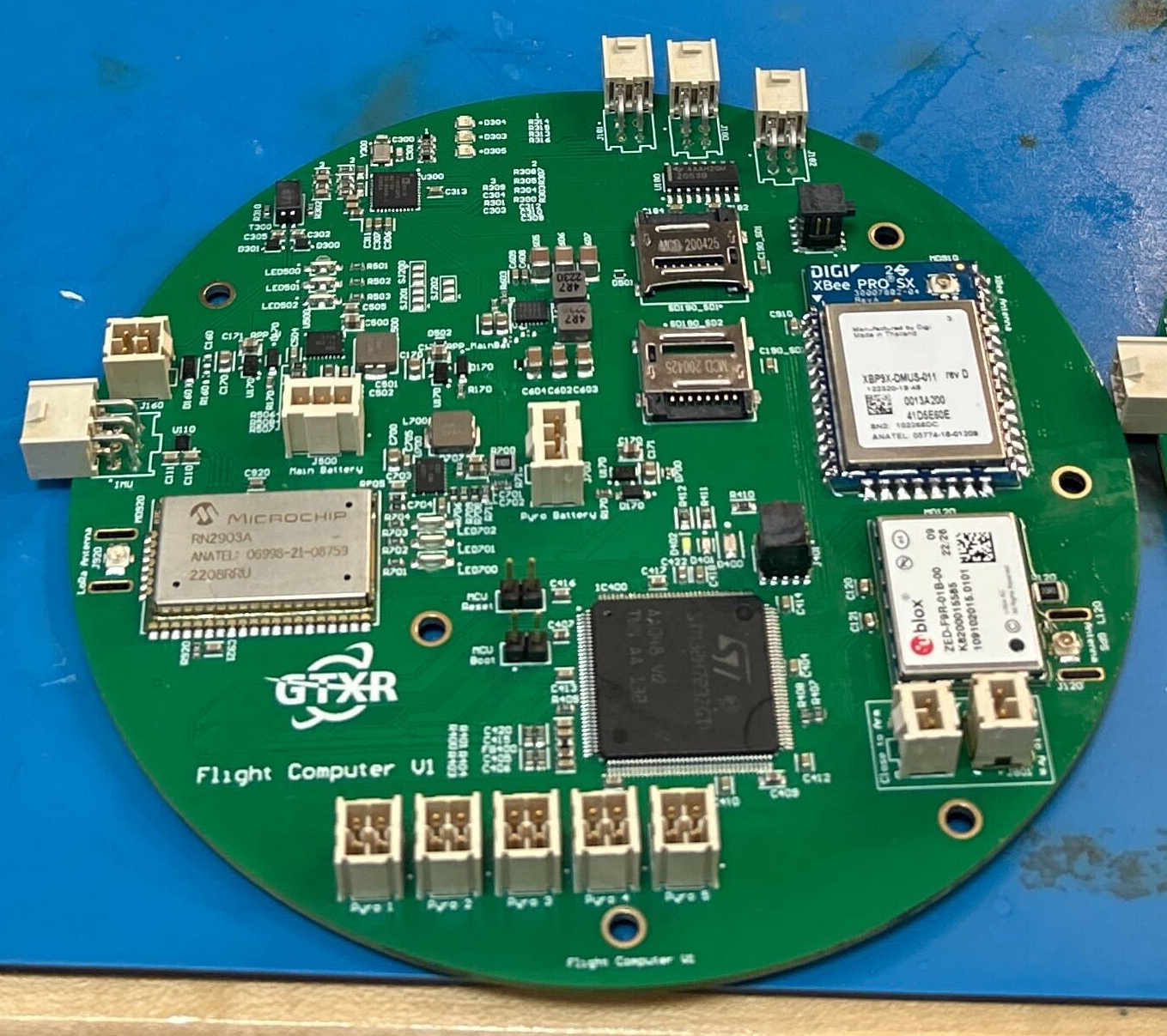
During my time as a member of Georgia Tech Experimental Rocketry, one of the most interesting projects I worked on was the development of a fully custom flight computer for a 2 stage rocket, capable of control and datalogging past 100km altitude (the boundary of space).
We initially started by looking for commercial options but found that no existing option met our requirements for staging control, communications/telemetry, and data acquisition, so we made the choice to develop our own.
I worked on this project with a few other students and was in charge of the microcontroller and sensing part of the board, some of the features include:
STM32F7 microcontroller, configured using STM32CubeMX software
3 different IMUs - high g, precision, and backup
GPS/GNSS module
Dual redundant telemetry systems
Dual barometer
MicroSD and QSPI flash data logging
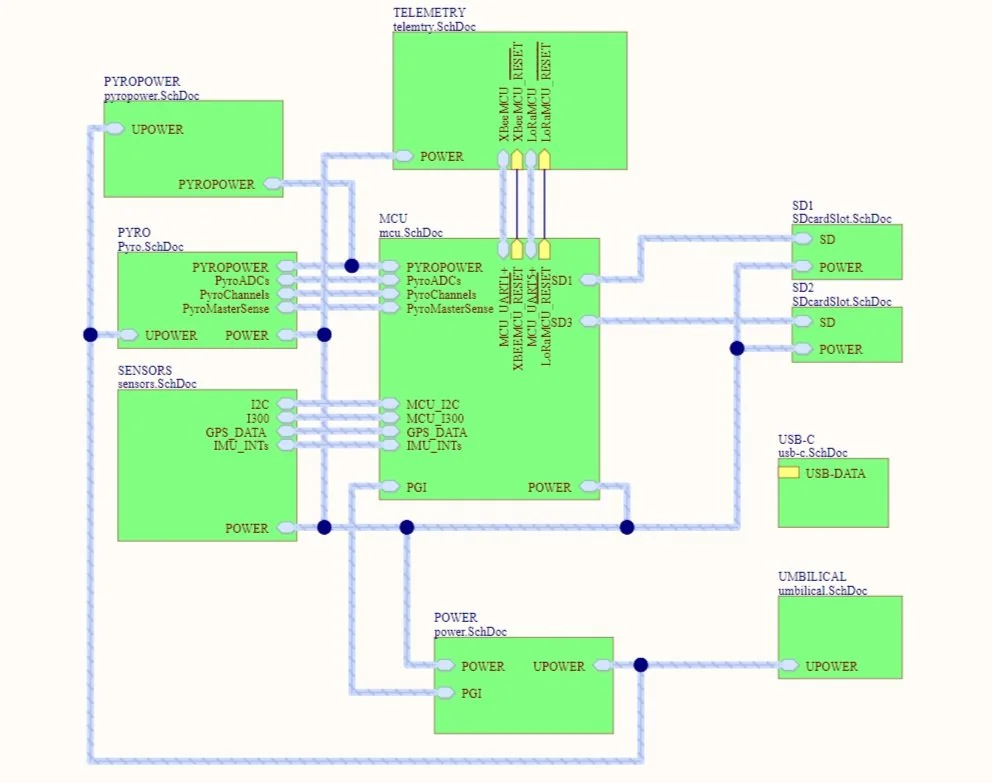
Throughout this project I got very familiar with Altium Designer as well as working on a complicated board with a small team, and also got introduced to hierarchical schematic design methods.
Rocket Motor Static Fire Ignition and Data Acquisition System
Fall 2022
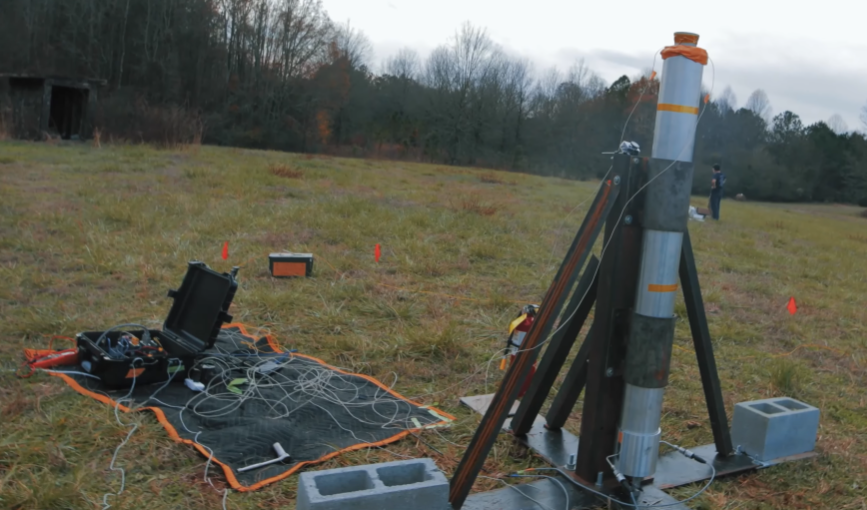
Another exciting project I worked on as part of GTXR was the ignition/data acquisition system for static fire testing of our rocket motors. GTXR’s rocket motors are all custom designed and built, from the motor casing to the propellant formulation and casting.
While this gives us a huge advantage in the cost and design flexibility areas, it means that we need to conduct full scale tests to ensure performance parameters such as thrust, burn rate, and chamber pressure match expected values from simulations.
Testing brings two challenges - igniting the motor safely from a remote location (~1000 feet radius was decided as the safety exclusion zone) and collecting all the necessary data on the first try. I mainly worked on the remote ignition system, consisting of both designing mechanical pull switches to arm the system from a distance, and integrating a pyro control board with our NI data acquisition system to trigger the ignition.
I also supported the data acquisition side, helping to interface the load cells, pressure transducers, and thermocouples with our NI DAQ system and designing wiring harnesses for all the necessary signals.